

锅炉飞灰取样装置详解及应用
锅炉飞灰取样装置详解及应用注意事项锅炉飞灰取样装置是燃煤锅炉系统中用于获取飞灰样品的重要设备,以下是对其的详细介绍:
发布时间:2025-02-18 01:24:02浏览数:


锅炉飞灰取样装置详解及应用注意事项锅炉飞灰取样装置是燃煤锅炉系统中用于获取飞灰样品的重要设备,以下是对其的详细介绍:

连云港灵动机电设备有限公司制造的粉煤灰取样器与煤粉取样器在功能和应用上存在相似之处,但两者并不遥遥相同,它们在设计和遥遥上仍有一些区别。

电厂飞灰取样器原理与应用介绍电厂飞灰取样器是用于从电厂锅炉尾部烟道中采集飞灰样品的专用设备。以下是对电厂飞灰取样器的详细介绍:

旋排式工业滤水器,适用于火力发电厂、水力发电站、钢铁、冶金、化工等企业过滤供用水管道-的生活-圾、工业废弃物、浮草、鱼虾、田螺等杂质。工业旋排式工业滤水器运行-发现的缺-而自行研制的系列产品。

随着产的不断改进越来越的设备在加药过程可以遥遥自动加药装置,自动加药装置已被的应用到各个生产域。1.发电厂锅炉给水的调节处理(加氨、加联胺、加除氧药剂)的计量加

便携式煤粉取样器的种类及应用场景概览便携式煤粉取样器具有多种样式,以满足不同场景和需求下的遥遥。以下是对几种常见便携式煤粉取样器样式的归纳:

煤粉取样器的基本介绍:煤粉取样器是针对火电厂直吹式制粉系煤粉取样问题,做的业自动化取样设备。依靠等圆环面积取样法,所取得的样具代表。煤粉取样器的工作原理:等圆环

连云港灵动机电设备有限公司换热器应用范围本厂家营产:浮头式换热器,换热器,固管板式换热器,换热器,U型管式换热器(U型管换热器),换热器,填料函式换热器,换热器

冷油器:电力系统中的关键冷却设备冷油器,作为电力系统中汽轮机配套的重要设备,扮演着透平油冷却的关键角遥遥。本文将从冷油器的基本概念、工作原理、结构特点以及其在电

不锈钢管换热管规格参数及应用凝汽器是汽轮发电机要的冷设备,由于江河湖海水系的污染,使凝汽器冷却管腐蚀速度加剧,造凝汽器频繁发生泄,严影响正生产。别是铜管易受氨离

汽轮机油水冷却器换管,船用油水冷却器换管,冷水器-换304/316l不...

蒸汽联箱又称辅助,供热,低压,高压蒸汽联箱等,随着火电厂蒸汽联箱的应用...

热力除氧器有高位热力除氧器和低位热力除氧器是锅炉及供热系统关键设备,如...

大气式旋膜式除氧器主要由除氧塔头、除氧水箱两大件以及接管和外接件组成,...

疏水集管生产厂家,疏水集管的作用就是用在汽轮机本体疏水扩容器及疏水箱的...

我们的换热管换管铜管主要是换热管冷却器遥遥在冷油器,凝汽器,冷却器,换...

冷凝器在线胶球清洗装置主要由收球网、胶球循环泵、装球器、程控系统、清洗...
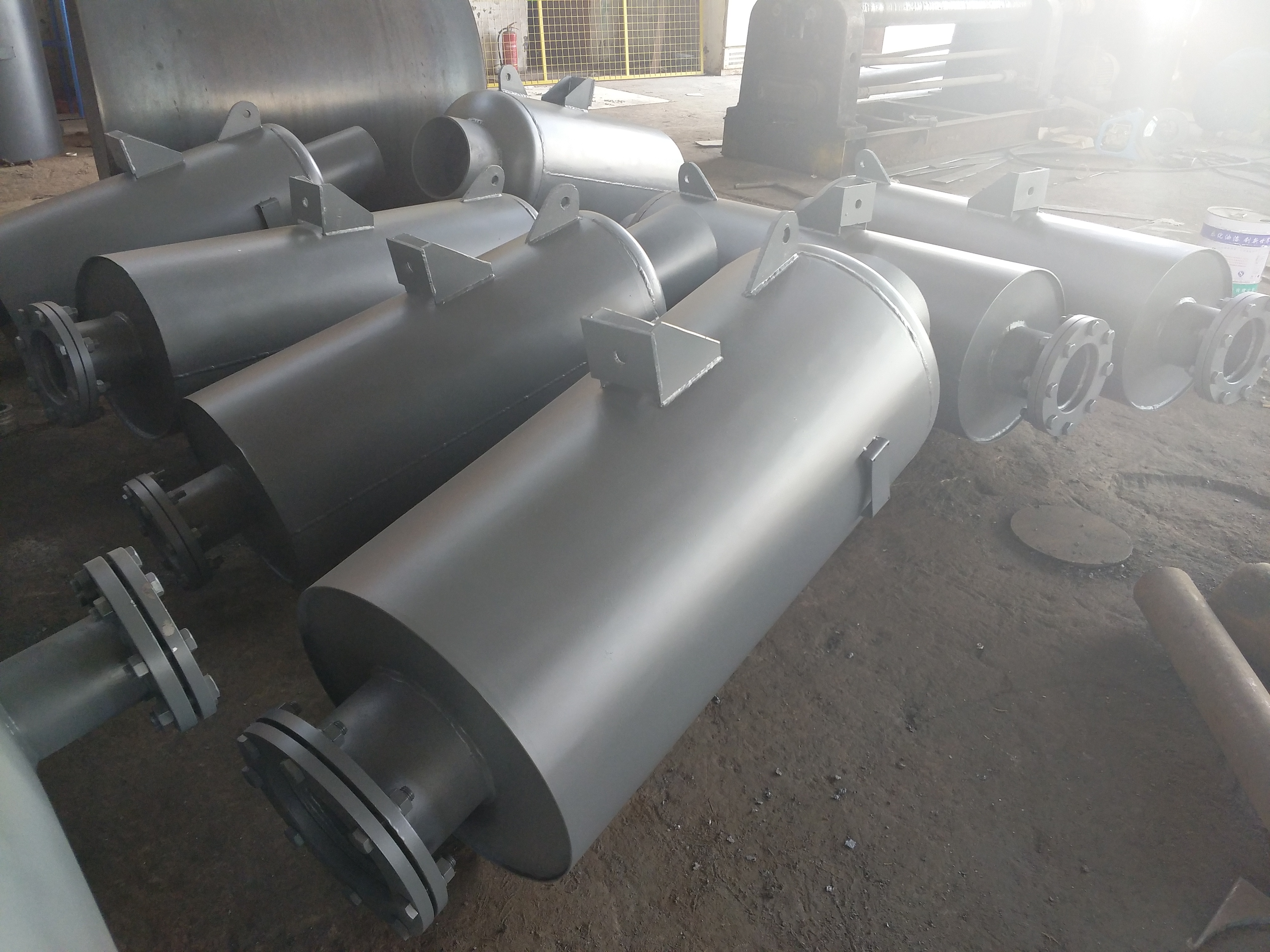
引风机消声器主要适用于降低罗茨系列风机的进气噪声,也可以用于对排气管道...

水泵真空保持器适用于各种用途的自吸式(负压吸水)水泵装置及水泵站,水厂...

集粒器也叫集渣器,对于-装再热机组蒸汽系统的吹洗,是防止由于在制造、运...

疏水箱是用来储存疏水的,如低压加热器及其它用蒸汽设备在工作过程-形成的...

放散消声器分为氧气放散消声器,氮气放散消声器等其他气体放散消声器,遥遥...

凝汽器管束更换原因及换热管材料技术解析(2025年工程技术视角)...

冷油器运维优化与技术创新(2025年实践指南)一、冷油器管束维护周期...

冷油器管束更换原因及换热管材料选择分析(2025年技术视角)一、冷...
冷油器:电力系统中的关键冷却设备冷油器,作为电力系统中汽轮机配套的重...

盘锦浩业化工大气式旋膜除氧器技术协议规范书? 大气式旋膜除氧器技术是锅...

你的不知道的制造业旋膜除氧器强大的作用? 你的不知道的制造业旋膜除氧器...

概述凝汽器胶球清洗装置由(二次滤网)、收球网、装球室、胶球输送泵和电气...


真空除氧器遥遥与锅炉焊接工艺不当是否受影响?真空除氧器遥遥与锅炉焊接工...
锅炉自动伸缩飞灰煤粉取样器产品安装应用?锅炉自动伸缩飞灰煤粉取样器产品...

如何选购优的旋膜式除氧器?如何选购优的旋膜式除氧器?的优一般都是取决于...

不锈钢换热管更换换热管的选用,不论是从遥遥能上比较,还是从上比较,有缝不...

工业全自动滤水器在水电厂供水系统中的应用_连灵动生产厂家Copyright © 2012-2025 连云港灵动机电设备有限公司 www.ld64.com版权所有
