发布时间:2024-12-14 01:27:11浏览数:


使凝汽器冷却管腐蚀速度加剧,造成凝汽器频繁发生泄-,严-影响正-生产。...

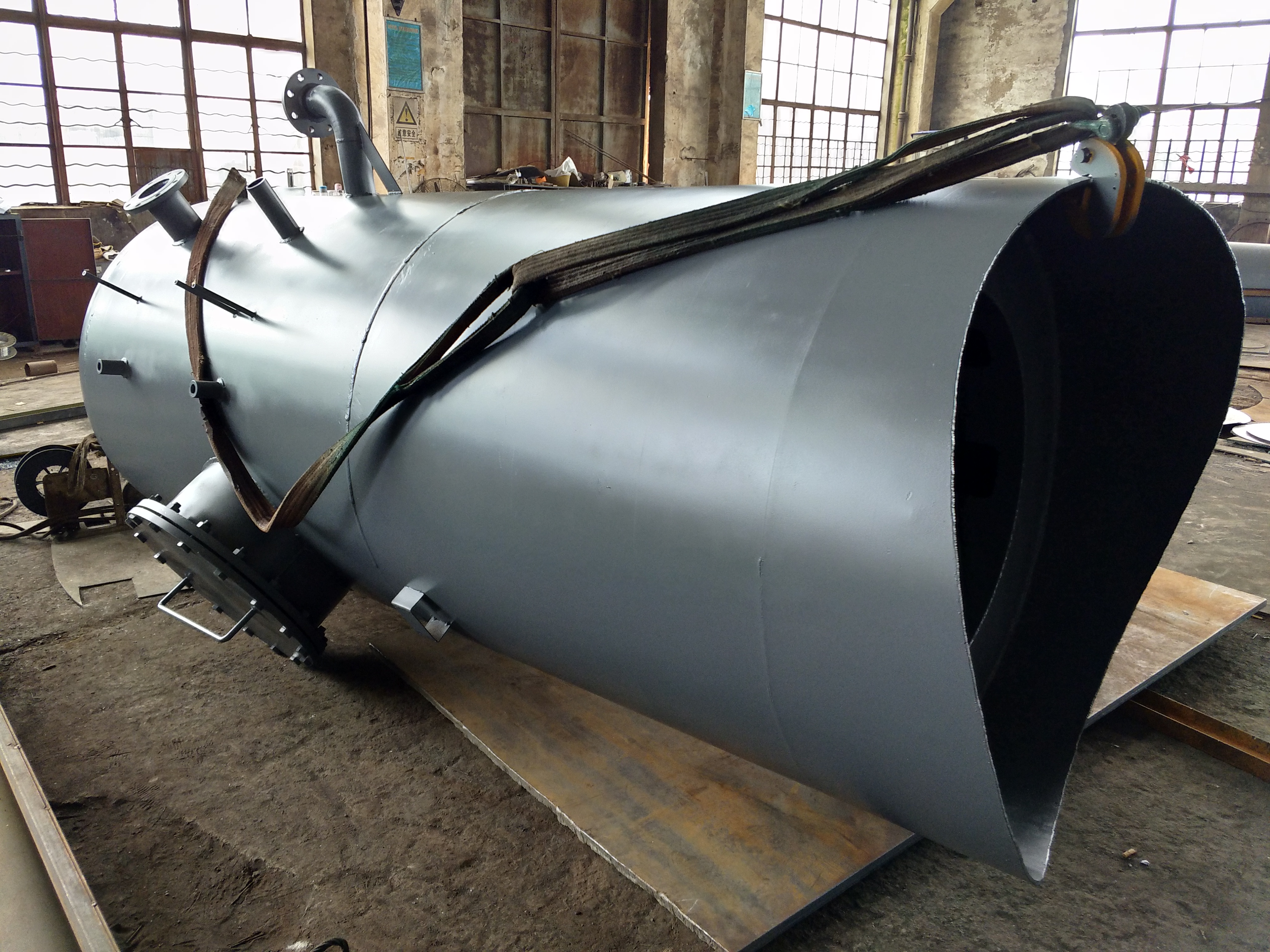
组合式风机消声器(组合式复合消声器)主要是有一个小孔式消声器穿插在一个...

无头除氧器由园柱体筒身和两个封头组成的卧式容器。采用两个鞍式支座,其-...

LS型冷水器又称为列管式冷水器或油水冷却器主要用于汽轮发电机的循环冷却...

鼓风机消声器主要适用于降低罗茨系列、轴流系列风机的进排气噪声,鼓风机消...

汽液两相流生产厂家,我们的汽液两相流又称汽液两相流自动调节液位控制器及...

二次滤网系统是净化水-污物、保持 凝汽器水室经-处于清洁状态,目-冷却...

低压加热器简称低加的作用是利用在汽轮机内做过部分功的蒸气,抽至加热器内...

集分水器又名分集水器是由集水器和分水器组合而成的水流量分配和会集装置。...
旋膜式除氧器除氧头改造设计主要是将原射流式改为旋射膜式,是集旋膜及泡沸...

压力式旋膜除氧器的压力高 工作压力在0.59MPa或0.78MPa(亚...

轴流风机消声器主要用于降低轴风机噪声,一般为圆形结构,分单空腔结构和双...

用途及优点 本产品适用于电力行业的高、低压加热器、连续排污扩容器、...

取样冷却器取样器用于炉锅房或发电厂内汽水化验取样冷却,锅炉及热力系统中...

1过滤器规格的选用应与安装管路相匹配,当过滤器流量不能满足管路要求时,...

净水器与滤水器的区别与作用净水器可以去除有害物质,保留有益物质。净水器...

消音器消声器 安装须知 (1)抗喷阻消声器(PB、TA)应垂直于炉...

除氧器旋膜除氧器旋膜式除氧器 结构及原理 旋膜式除氧器的结构是由除...

以下是全自动过滤器刷式过滤器十五大特点 1电力驱动,不锈钢刷式...

随着城市发展进程的加快,城市也在不断的加大污水处理厂的建设力度,在全力...

反冲式工业滤水器安装在电站、化工、印染、造纸等各种行业的供用水管道上,...

滤水器全自动滤水器滤水器全自动滤水器 滤水器全自动滤水器滤水器全自动滤...

安全阀排汽消音器安全阀排汽消声器消声器原理 我厂安全门消声器采用...

反冲式工业滤水器安装在电站、化工、印染、造纸等各种行业的供用水管道上,...
Copyright © 2012-2024 连云港灵动机电设备有限公司 www.ld64.com版权所有